2025/11/10 09:00
新卒or研修生
電気・電子設計エンジニア
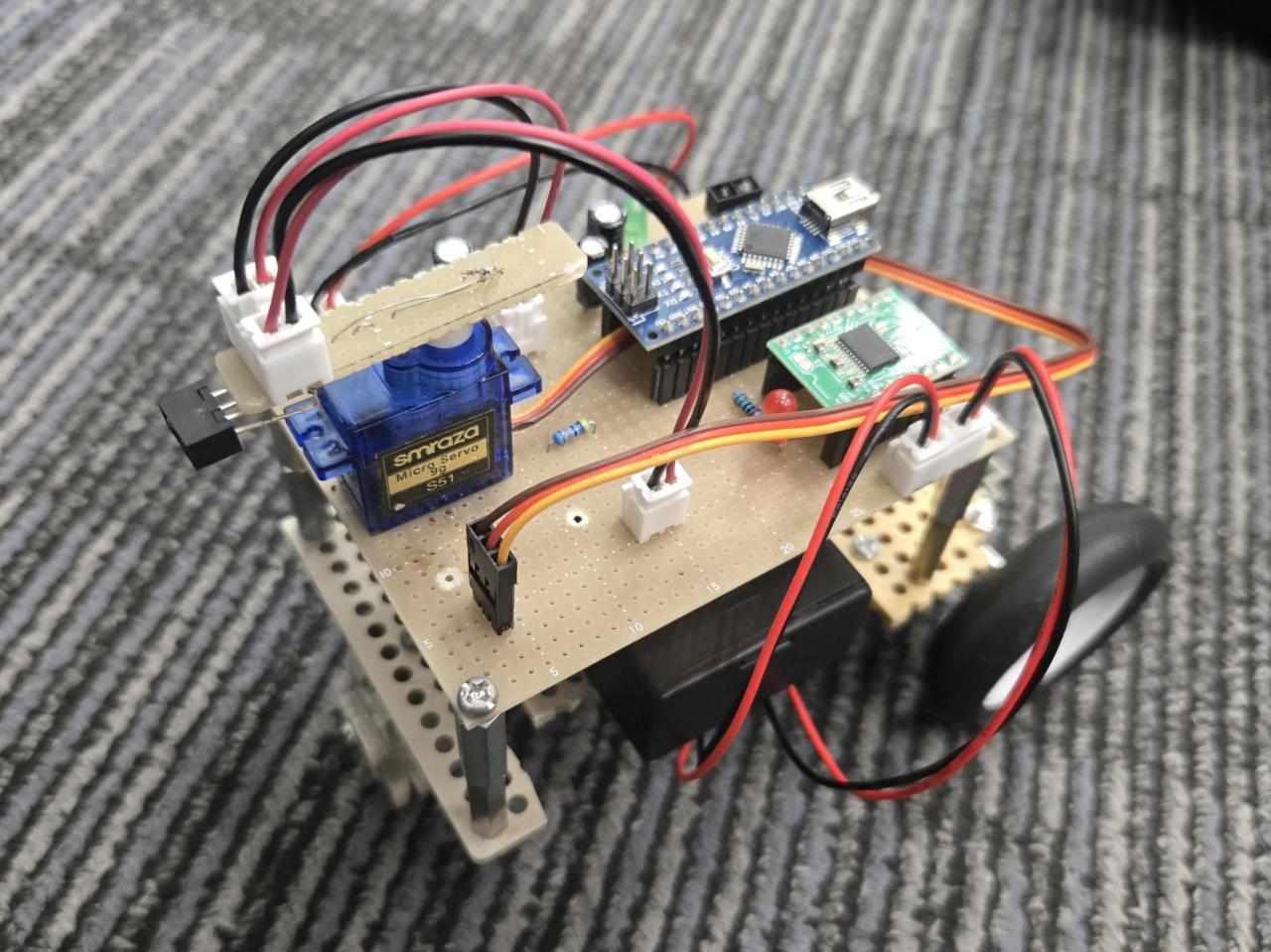
踊る自走車の改善作業
前回作成した自走車の改善に取り組み、その基板の作成を行いました。先週の時点で配線図の作成を終え、部品の配線をスムーズに進めることができました。しかし、今回新たに追加した要素である障害物検知用の赤外線センサーとサーボモーターが思うように動作せず、何度も配線をやり直すことになってしまいました。
配線作業を終えた後はプログラムの調整を行い、自分が改善したいと考えていたすべての点について、無事に対応することができました。今回の改善作業では、作業が途中で止まってしまったり、手戻りが発生したりといくつかの課題も経験しました。今後の研修ではこうした問題を未然に防ぐためにも、事前の確認や計画をより丁寧に行いながら作業を進めていきたいと思います。
U.S.(電気電子系研修生)