2026/2/13 09:00
新卒or研修生
組込み系エンジニア
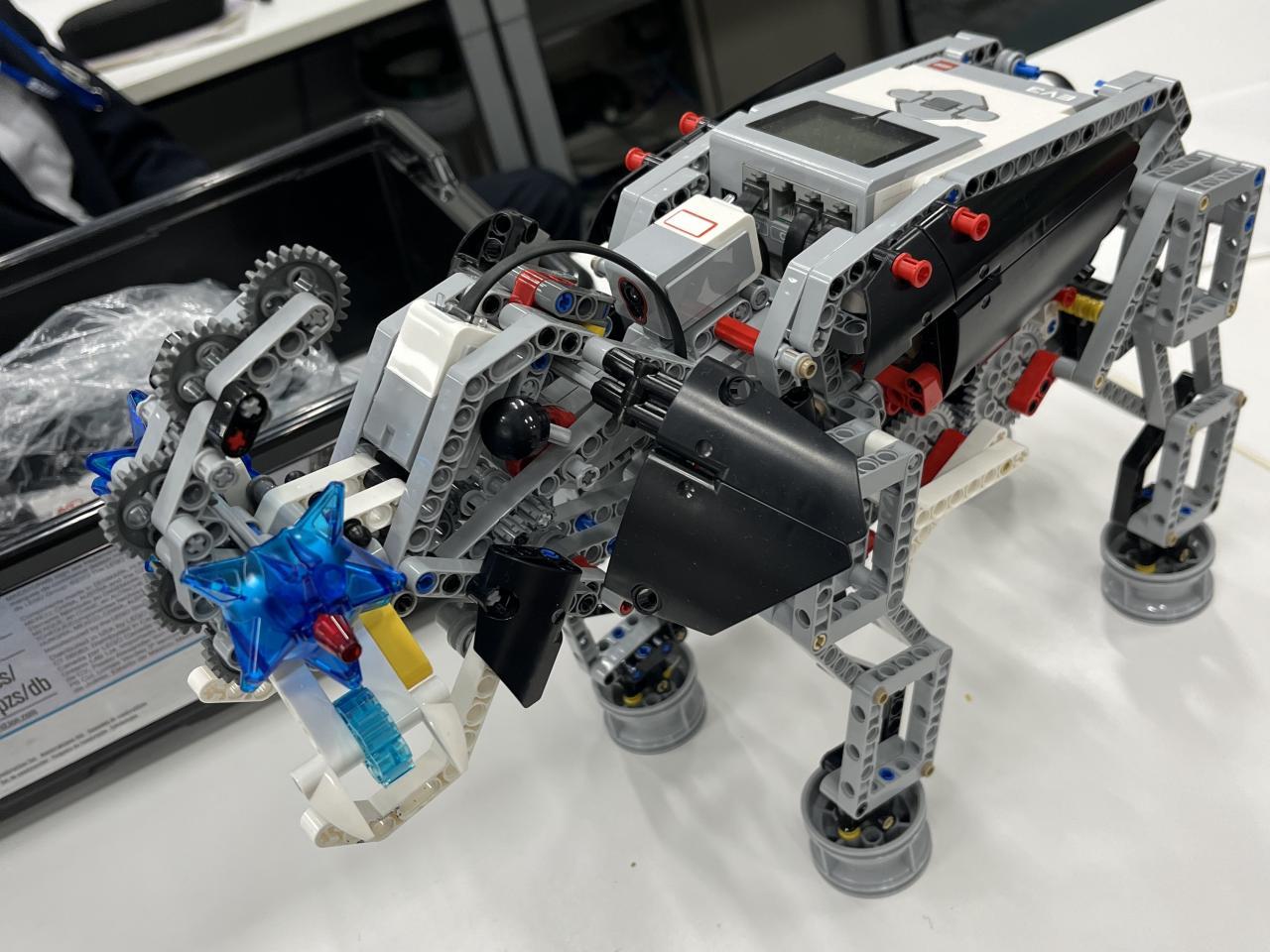
象ロボット
今週はLEGOを使って象をモチーフにしたロボットの制作に取り組みました。今回の演習では、複数のモーターを協調させる制御方法、動作パターンの設計、さらにセンサーを活用した動きの調整など多くのことについて学ぶことができました。単なるプログラミングにとどまらず、実際のハードウェアを動かすことで、モデルベース開発の考え方を体験的に理解できたことは大きな収穫です。この演習を通じて MATLABおよびSimulinkの操作スキルを着実に向上させることができました。今後もこうした学習を継続し、就業後に即戦力として活用できるレベルまでスキルを高めていきたいと考えています。特に、より複雑な制御モデルやシミュレーションの構築にも挑戦し、実務に直結する知識を積み重ねていくことを目標としています。
Y.K.(組込系研修生)